Câblage

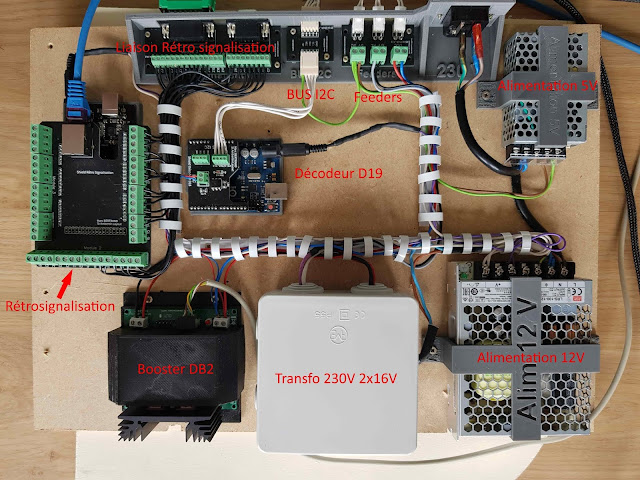
Le câblage des modules est en cours. Voici un exemple d'implantation sous le module 2. Vue générale A droite les liaisons entre modules, au centre 3 modules de détection de consommation de courant pour la rétro signalisation, un moteur d'aiguille. L'autre extrémité du module. Cela peut paraitre complexe et ca l'est lorsqu'on planifie le câblage. Qui a dit que le digital simplifiait ce dernier? En général oui. Mais dans mon cas, l'appel à des solutions non conventionnelles pour la partie DCC nécessite une adaptation un tantinet plus étoffée. Mais au final lors de réalisation, on s'y retrouve.